Stabilità dei sistemi di controllo

Corso on-line tenuto dall'ing. Gianluca Angelone
- Lezione [1] - Introduzione. Lur'e problem
- Lezione [2] - Well-posedness del problema
- Lezione [3] - Congetture di Aizerman e Kalman
- Lezione [4] - Sistemi passivi. Funzioni non lineari senza memoria
- Lezione [5] - "Positive Real" Lemma o "Kalman-Yakubovic-Popov" Lemma
- Lezione [6] - Interconnessione di sistemi
- Lezione [7] - Criterio del cerchio. Loop transformation
- Lezione [8] - Dal piccolo guadagno al cerchio
- Lezione [9] - Criterio di Popov


 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica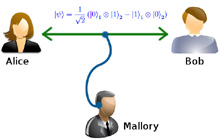 Entanglement Quantistico
Entanglement Quantistico