"Positive Real" Lemma o "Kalman-Yakubovic-Popov" Lemma
martedì, Agosto 4th, 2020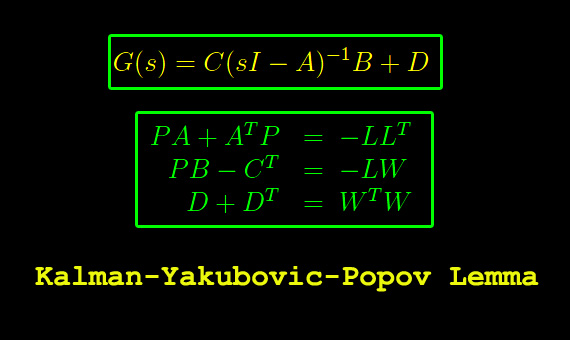
Definiamo la passività per i sistemi dinamici, rappresentati in forma di stato

dove f:Rn×Rp -> Rn è localmente Lipschitz, h:Rn×Rp -> Rn è continua, f(0,0)=0 e h(0,0)=0. Il sistema ha lo stesso numero di ingressi e uscite. Il sistema si dice passivo rispetto ad una funzione di alimentazione s(t)=uTy se l'energia assorbita in un qualsiasi intervallo di tempo [0,t] è maggiore o uguale dell'incremento dell'energia accumulata dal sistema nello stesso intervallo di tempo. Tale definizione è mutuata dalla teoria dei circuiti: in una rete elettrica composta da resistori, induttanze e condensatori l'energia accumulata nei condensatori e negli induttori è inferiore o, al più, uguale all'energia fornita dai generatori. Detta energia è pari all'integrale sul periodo considerato del prodotto fra la tensione applicata e la corrente erogata. Se si definisce la tensione come ingresso e la corrente come uscita (o viceversa) si può dire che la rete elettrica (ovvero l'inpedenza equivalente) è passiva rispetto all'alimentazione s(t)=v(t)i(t). Il concetto di passività può essere esteso ad una rete multiporte se si applica ad ogni porta la definizione di ingresso e uscita vista. In tal caso la funzione di alimentazione è il prodotto scalare del vettore degli ingressi per il vettore delle uscite.
Astraendo dalla natura fisica del sistema si può definire passivo un sistema per cui
(altro…)


 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica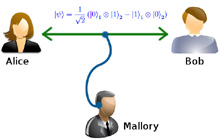 Entanglement Quantistico
Entanglement Quantistico