Alle funzioni vettoriali, quali applicazioni tra spazi vettoriali, si applicano le definizioni di suriettiva, iniettiva, bi-iettiva. In particolare: Definizione
Assegnata una funzione vettoriale f:E->F, dicesi immagine di E attraversof , l'insieme
Tale sottoinsieme di F è anche noto come immagine dell'applicazione f (anziché dello spazio vettoriale E).
Osservazione Si badi che in generale, f(E) non è un sottospazio vettoriale di F. Come vedremo in seguito ciò si verifica solo per una particolare classe di applicazioni.
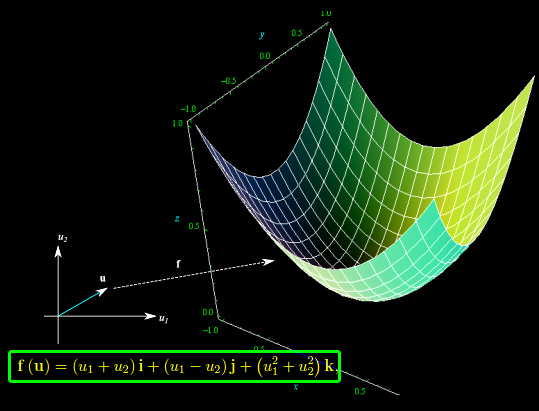
Nelle lezioni precedenti abbiamo introdotto la nozione di rappresentazione parametrica (avente per base un assegnato aperto U di R²) di una superficie S, per poi osservare che quest'ultima è l'immagine di un'applicazione che associa univocamente ad ogni elemento di U, un elemento di S. Ne consegue che la nozione di rappresentazione parametrica "parla" il linguaggio delle funzioni (naturalmente intese come legge di corrispondenza tra due insiemi).
Nello specifico, gli elementi di U sono vettori di un assegnato sottospazio vettoriale dello spazio euclideo bidimensionale (R²) , mentre una qualunque superficie S è un sottoinsieme dello spazio euclideo tridimensionale R³, ma non un suo sottospazio vettoriale. Vediamo, dunque, che nella definizione di rappresentazione parametrica di una superficie, sono coinvolti gli spazi vettoriali (euclidei) R² e R³. Ne consegue che la predetta rappresentazione parametrica altro non è che una legge di corrispondenza tra tali spazi vettoriali. È preferibile comunque, riferirsi a spazi vettoriali (finito-dimensionali) su un qualunque campo K. (altro…)



 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica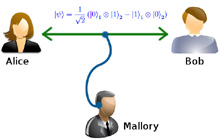 Entanglement Quantistico
Entanglement Quantistico