definita in B e a valori nel piano cartesiano (θ,φ), e tale che
In generale, la predetta applicazione non è globalmente iniettiva, ma lo è localmente in virtù del Teorema del Dini
Precisamente:
con inversa
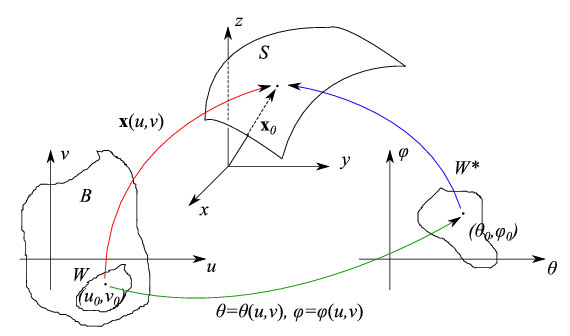
che è di classe C^{p} su W^{*}, come illustrato in fig.
In altre parole, per il teorema del Dini la restrizione di θ(u,v),φ(u,v) all'aperto W è bi-iettiva, quindi invertibile:
Tale applicazione ci consente di definire la funzione composta:
Calcoliamo le derivate parziali applicando la regola di derivazione delle funzioni composte:
Quindi il prodotto vettore:
Lo jacobiano della trasformazione u=u(θ,φ),v=v(θ,φ) è
Quindi
cosicché x=ξ(θ,φ) è una rappresentazione parametrica regolare di classe Cp su W*, di S* contenuta in S, dove S* è l'immagine di W*. Diremo che la predetta rappresentazione è una carta locale di classe C^p su W*, di S*. (altro…)
Nel caso delle curve abbiamo visto che una rappresentazione parametrica è una funzione vettoriale di una variaible reale t (parametro della rappresentazione) x=x(t) i.e. una terna ordinata di funzioni scalari:
È intuitivamente ovvio aggiungere un parametro per poter rappresentare una superficie di R³:
Queste equazioni istituiscono una corrispondenza tra i punti (u,v)?B e i punti della superficie S rappresentata parametricamente dalla predette equazioni, come illustrato in fig. 1. Alle linee coordinate u=u0,v=v0 - nello spazio B - corrispondono sulla superficie S, le curve:
come illustrato nella seguente figura:
Assumendo le x(u,v),y(u,v),z(u,v) parzialmente derivabili in B, costruiamo la matrice jacobiana della predetta rappresentazione
Definizione La rappresentazione parametrica assegnata è una rappresentazione parametrica regolare di classe Cp (p >= 1), se
1) e funzioni x(u,v),y(u,v),z(u,v) sono di classe Cp in B, i.e. continue in B e ivi dotate di derivate parziali continue fino all'ordine p;
2) risulta
Si noti che la sola condizione di derivabilità delle predette funzioni ci permette di definire un vettore tangente alle u-curve e alle v-curve. Precisamente:
essendo
Ne segue che xu(u0,v0) è un vettore tangente a Γu nel punto P0(u0,v0). In maniera simile, xv(u0,v0) è un vettore tangente a Γv nel medesimo punto, come illustrato in fig.




















 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare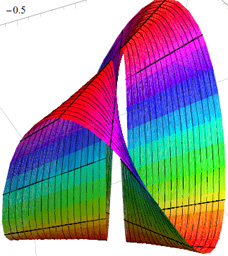 Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica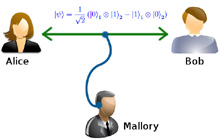 Entanglement Quantistico
Entanglement Quantistico