[¯|¯] Principio dei moti relativi
giovedì, Gennaio 2nd, 2020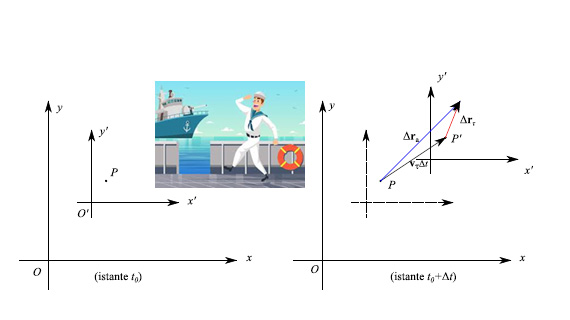
La nozione di sistema di riferimento è vitale per la definizione delle varie grandezze cinematiche (posizione, velocità, accelerazione). A volte si manifesta la necessità di riferire il moto di un punto materiale a due sistemi di riferimento distinti, di cui uno è in movimento rispetto al primo. Sussiste la seguente definizione:
Definizione
Siano K e K' due sistemi di riferimento, di cui K lo possiamo ritenere fisso, mentre K' si muove rispetto a K. Dicesi moto assoluto il moto di un punto materiale rispetto a K. Dicesi moto relativo il moto del medesimo punto rispetto a K'. Il moto di trascinamento è il moto dei punti solidali a K.
Si pensi, ad esempio, ad un marinaio che cammina sul ponte di una nave in navigazione. Schematizzando il marinaio attraverso un punto P ed assumendo come sistema di riferimento fisso un sistema K solidale alla Terra, e come mobile un sistema K' solidale alla nave, il moto assoluto di P è quello del marinaio rispetto alla terraferma, il moto relativo di P è quello del marinaio rispetto alla nave, il moto di trascinamento è quello della nave rispetto alla terraferma.
(altro…)


 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2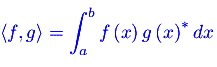 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica Entanglement Quantistico
Entanglement Quantistico