Problema di inseguimento in coordinate polari nel piano (radar/IRST)
Marzo 15th, 2022 | by Marcello Colozzo |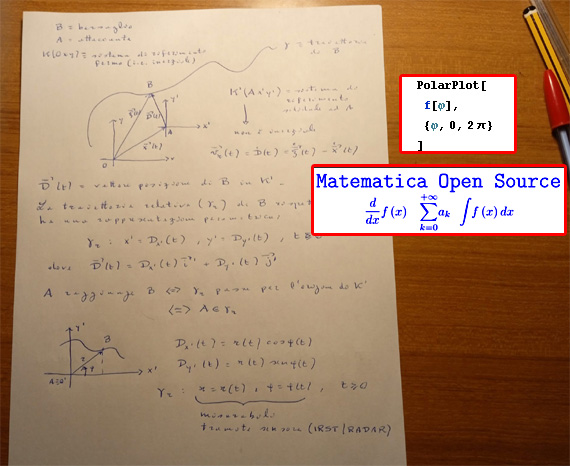
Premessa. Matematicamente, la superficie terrestre è un geoide, i.e. una superficie equipotenziale del campo gravitazionale terrestre. Tecnicamente, si realizza applicando la seguente condizione: la normale alla superficie coincide con la verticale determinata attraverso il cosiddetto filo a piombo.
Tale superficie è regolare e come tale, dotata di piano tangente. Ciò è vitale per applicazioni come il RADAR, il quale posiziona "bersagli" in un sistema di coordinate polari nel piano tangente e avente per polo l'antenna del radar medesimo.
Ciò premesso, a breve verrà pubblicato il nostro articolo sul problema di inseguimento sulla piattaforma di AspenCore con particolare riferimento ai sensori IRST montati a bordo di missili.
Cercando di migliorare il tiro (termine davvero indovinato 🙂 ), possiamo considerare il problema in termini di coordinate polari nel piano. Immaginiamo una nave che utilizza il RADAR per posizionare "bersagli" nelle immediate vicinanze (ricordiamo che il radar è un "short range navigation", a causa della portata limitata offerta dalle microonde). Per quanto precede, il posizionamento è in coordinate polari nel piano tangente alla superficie terrestre. È importante la scelta dei simboli, e qui c'è molta confusione. In Navigazione si utilizza ρ per l'anomalia (che si chiama rilevamento polare) e d per il raggio vettore (denominato distanza). In Fisica 1 si utilizza φ per l'anomalia ed r per il raggio vettore. In Analisi matematica si utilizza θ per l'anomalia e ρ per il raggio vettore. Noi ci conformiamo ai simboli di Fisica 1.
La scelta del sistema di rifermento K' solidale all'attaccante (o alla nave in caso di navigazione marittima) potrebbe destare qualche perplessità in quanto non è inerziale. Tuttavia, ciò non crea problemi in quanto stiamo trattando da un punto di vista cinematico. In caso di rilevamento polare costante (i.e. anomalia costante) e distanza che diminuisce nel tempo, siamo nei guai: c'è rotta di collisione. Ma è chiaro che in un problema di inseguimento, è proprio questa la condizione che stiamo cercando.
In un successivo lavoro vedremo come utilizzare l'istruzione PolarPlot del softare Mathematica.


 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica Entanglement Quantistico
Entanglement Quantistico