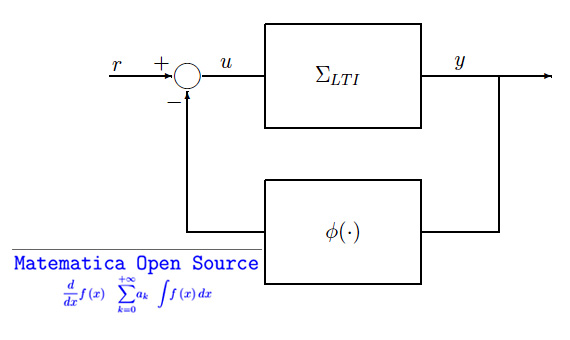
Le ipotesi di osservabilità e controllabilità ci assicurano che {A,B,C,D} è una realizzazione minima del sistema lineare, cui corrisponde una G(s) razionale propria. La funzione φ(·) deve essere tale che il sistema a ciclo chiuso possieda una soluzione unica: una condizione sufficiente affinchè l'equazione dx/dt=Ax-Bφ(·)(Cx), nel caso D=0, abbia una soluzione unica è che la funzione φ(·) sia almeno Lipschitz in un intorno dello zero (condizione di esistenza ed unicità locale). Nel caso D diverso da 0 occorre aggiungere una condizione più restrittiva. Si deve verificare anche che la relazione ingresso-uscita
abbia una unica soluzione y=h(x): se la funzione φ(·) è monotona si può dimostrare che y=Cx+Dφ(y) possiede un'unica soluzione y=h(x) per ogni x appartenente a Rn [1]. (altro…)
Il problema della stabilità assoluta, formulato originariamente da Lur'e, e pertanto detto anche Lur'e problem, riguarda lo studio della stabilità di un sistema ottenuto dalla retroazione di un sistema dinamico lineare con uno statico non lineare. Il problema è di particolare rilevanza nella teoria dei controlli automatici in quanto un generico sistema di controllo contiene tipicamente dei componenti non lineari (nel caso più comune c'è la saturazione degli attuatori, o ci sono trasduttori con caratteristiche nonlineari al di fuori dell'intervallo di funzionamento nominale) ed è interesse del progettista evitare che eventuali non linearità possano compromettere la stabilità del sistema a ciclo chiuso. Il problema si pone, quindi, in maniera generale come analisi della stabilità rispetto ad una classe di funzioni non lineari, con determinate caratteristiche, piuttosto che lo studio riferito ad una particolare non linearità [1]. Nel seguito, per semplicità, assumeremo che φ(·) è una funzione continua, escludendo quindi i cosiddetti "salti" e le funzioni a valori in un insieme (set-valued functions). (altro…)



 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica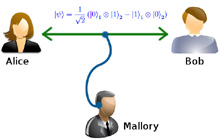 Entanglement Quantistico
Entanglement Quantistico