Sistemi passivi. Funzioni non lineari senza memoria
lunedì, Agosto 3rd, 2020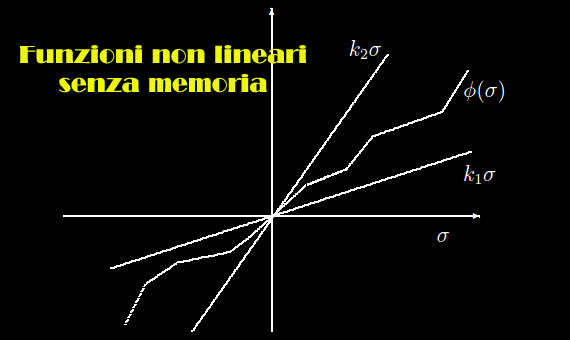
La teoria della passività fornisce utili strumenti nello studio dei sistemi nonlineari legando la teoria di Lyapunov e la stabilità L2. Il principale risultato di questa teoria è il teorema che afferma che la connessione in retroazione di due sistemi passivi è a sua volta passiva. Questa è una importante generalizzazione del fatto che una connessione in retroazione di due sistemi lineari stabili è ancora stabile se il guadagno di anello è minore di uno, o la fase complessiva minore di 180 gradi.
Si consideri una funzione nonlineare scalare senza memoria y=φ(u) dove φ:R->R rappresenta il legame ingresso uscita di un sistema statico. Si può definire il prodotto fra l'ingresso e l'uscita come la potenza assorbita dal sistema. Si può pensare, come esempio, ad un resistore in cui l'ingresso sia la corrente iniettata i e l'uscita la tensione v=Ri che si stabilisce ai suoi capi. Il prodotto ingresso-uscita è la potenza assorbita dal resistore: v·i=Ri². Se il prodotto ingresso-uscita è positivo, come nel caso del resistore, il sistema si dice essere passivo.
Si può fornire una interpretazione geometrica alla proprietà di passività: la curva che rappresenta la funzione φ deve essere nel I e III quadrante; ad esempio la nonlinearità rappresentata in Figura 1 è passiva. Si può dire, quindi, che una funzione φ è passiva, se

Può essere interessante estendere il concetto di passività a sistemi multiporte, y=φ(u) dove φ:Rp -> Rp. In questo caso, considerando il prodotto scalare uTy, la funzione si dice passiva se uTy >= 0.
Nel caso in cui il prodotto uTy=0 il sistema si dice senza perdite. Un esempio di sistema senza perdite è il trasformatore ideale in cui, dette rispettivamente v1=u1 e i1=y1 la tensione e la corrente al primario e v2=u2 e i2=y2 la tensione e la corrente al secondario si ha (applicando la convenzione dell'utilizzatore ad entrambe le porte): v1i1+v2i2=0 o, equivalentemente uTy=0.
Se uTy > 0 per ogni u non nullo la funzione si dice input strictly passive, perchè la passività è stretta nel senso che uTy=0 solo se u=0. Nel caso scalare questo implica che la curva non tocca l'asse delle ascisse, ad eccezione dell'origine. In maniera analoga la funzione si definisce output strictly passive se
uTy > 0 per ogni y non nullo, ovvero la passività è stretta nel senso che uTy=0 solo se y=0 e nel caso scalare questo implica che la curva tocca l'asse delle ordinate esclusivamente nell'origine [1]


 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica Entanglement Quantistico
Entanglement Quantistico