[¯|¯] Il concetto di base ortonormale rotante
sabato, Gennaio 11th, 2020
Riprendiamo l'equazione che lega la derivata assoluta di una funzione vettoriale u(t) alla derivata relativa della medesima funzione, determinata in un sistema di coordinate K'(O'x'y'z') rotante rispetto al sistema K(Oxyz) in cui è calcolata la predetta derivata assoluta:

essendo ω il vettore velocità angolare di K'. Tale grandezza soddisfa le equazioni di Poisson

ove i',j',k' sono i versori degli assi coordinati di K'. Per un assegnato vettore ω le equazioni di Poisson costituiscono un sistema di tre equazioni differenziali vettoriali (quindi sei equazioni differenziali ordinarie) nelle incognite i'(t),j'(t),k'(t).
(altro…)


 Congettura di Riemann
Congettura di Riemann Trasformata discreta di Fourier
Trasformata discreta di Fourier
 Trasformata di Fourier nel senso delle distribuzioni
Trasformata di Fourier nel senso delle distribuzioni Trasformata di Fourier
Trasformata di Fourier  Infinitesimi ed infiniti
Infinitesimi ed infiniti Limiti notevoli
Limiti notevoli Punti di discontinuità
Punti di discontinuità Misura di Peano Jordan
Misura di Peano Jordan Eserciziario sugli integrali
Eserciziario sugli integrali Differenziabilità
Differenziabilità  Differenziabilità (2)
Differenziabilità (2) Esercizi sui limiti
Esercizi sui limiti Appunti sulle derivate
Appunti sulle derivate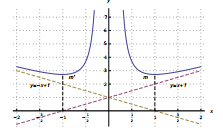 Studio della funzione
Studio della funzione Esercizi sugli integrali indefiniti
Esercizi sugli integrali indefiniti Algebra lineare
Algebra lineare Analisi Matematica 2
Analisi Matematica 2 Analisi funzionale
Analisi funzionale Entanglement quantistico
Entanglement quantistico Spazio complesso
Spazio complesso Biliardo di Novikov
Biliardo di Novikov Intro alla Meccanica quantistica
Intro alla Meccanica quantistica Entanglement Quantistico
Entanglement Quantistico